Active Research
At ELPIS Lab - WPI
Advisor: Prof. Constantinos Chamzas
- Researching End-End Reinforcement learning approaches for Robot Gripper Grasping and Manipulation.
Pick and Place on UR10 (Language Grounded Vision)

Another Robot I work with

At Perception and Autonomous Robotics Group (PeAR) - WPI
Advisor: Prof. Nitin J Sanket - Group Link
- Researching Optical flow methods for Navigation of Mini Drones in Complex navigation scnearios.
- Submitted Work to IEEE RAL.
- Paper Website Link

Projects - Academic/Personal
-
Autonomous Bot-v1 using DL and ROS(Ongoing) - Fun Project
Development of an Autonomous bot using ROS, Object Detection, Lane Detection, and path planning using Jetson Nano, RPI4 with a night vision system implemented.
-
Auto RC Car using Tiny ML (Ongoing) - Fun Project:
Integrating RC Car (1:10) with vision and sensory models and using Tiny ML for low-powered micro-controllers to understand the capability of edge computing.
-
Indoor Robot Navigation - Motion Planning
Comparison of Traditional Planners such as RRT, A* with End to End learning approaches for Indoor Embodied navigation.
Github Page | Report
-
3R Link Manipulator - Manipulation and Dynamic Analysis
Design and detailed analysis of a 3 R Link Robot which can reach specified positions in the Workspace.
Github Page | Report
-
Alien Catcher
Catching UAV’s in a space with a Drone using LQR Control Strategy.
Github Page | Report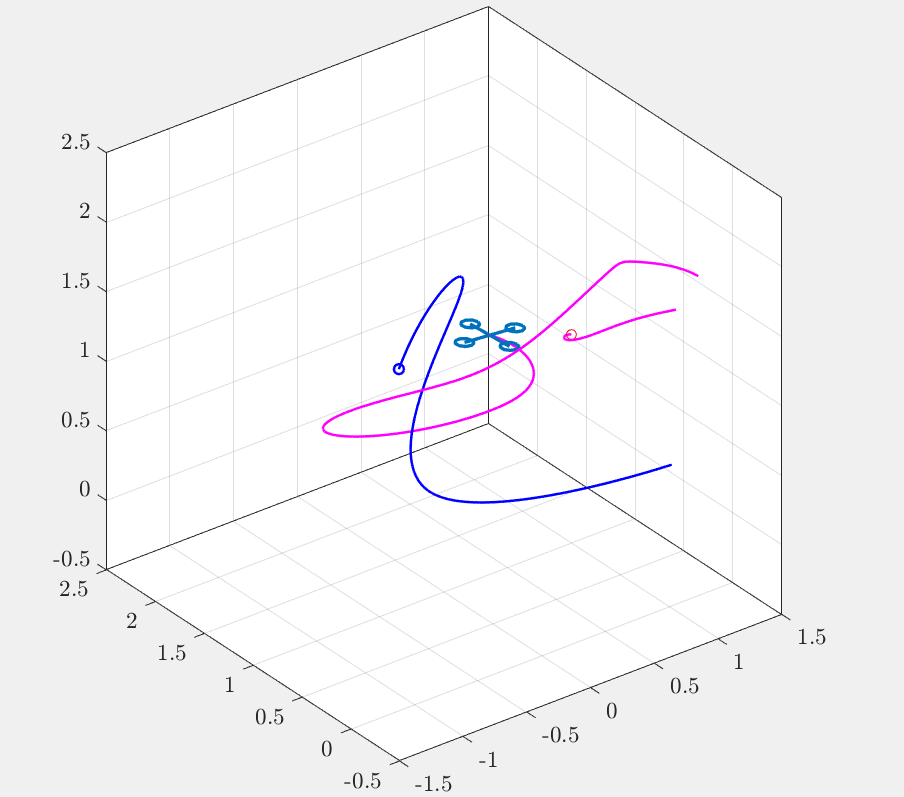
-
Multi Class Classification on Large Number of Classes
Part of Minor Thesis project - Post Graduate Diploma. This Project involves trying to get the State of the Art (SOTA) accuracy on Cdiscount dataset. Explored multiple models such as Efficient Net, ResNet etc.
Github Page | Report | Live Deploymnent
-
Knee Rehabilitation System:
Fabrication of a device with 2 DOF mechanism which can be used for performing Flexo-extension exercises can be used for Knee rehabilitation purposes.
Hip Flexo Extension Knee Flexo Extension 

-
Online Shopping skillset for Alexa - NITCkathon.ai (24hr event)
As part of NITC hackathon conducted by JMR InfoTech, worked as a 3-member team and developed a skillset for Amazon Alexa to understand different skills related to online shopping.
-
RIGGU V2-The Semi Humanoid :
A complete framework for the development of an Interactive Semi-Humanoid Robot using technologies like AI, NLP, ROS, SLAM.
- Quadcopter: Autonomous Quadcopter based on PixHawk Flight controller integrated with a Raspberry Pi.
-
Hexacopter:
Hexacopter based on ARM and equipped with manual control. PID tuning was done for stability. This project involves the testing and performance analysis of hexacopter on PID and backstep algorithms. -
Robocon Bot:
A manual bot that can throw disks at specified positions which were made by our Robotics Interest Group for National-level Robotics Competition called Robocon-2017.
